La perceuse Genko TB6 est une petite perceuse d’établi professionnelle, vendu également par Metabo sous la référence T6. Voyons ses caractéristiques et sa remise en état.
Poids : environ 30 Kg, mandrin Albrecht en cône B10, 0 à 5mm.
Elle est équipée d’un moteur universel à excitation série haute vitesse non compensé, alimenté en courant redressé simple alternance, en mode excitation série. Il trouve son utilisation dans une grande variété d’applications grand public et industrielles légères. Il est utilisé dans les mixeurs, les outils portatifs, les aspirateurs et dans de nombreux autres appareils.
C’est un moteur DC à balais à excitation par deux pôles saillants sur le stator. Un moteur universel est similaire à un moteur DC à balais, modifié pour un fonctionnement correct en courant alternatif. Contrairement à un moteur DC qui peut fonctionner avec des aimants permanents à la place des bobines d’excitation, un moteur universel a toujours besoin de bobines d’excitation : c’est l’inversion du champ magnétique à la fois dans le rotor et dans le stator qui permet d’avoir un couple toujours orienté dans le même sens et donc de tourner normalement en courant alternatif.
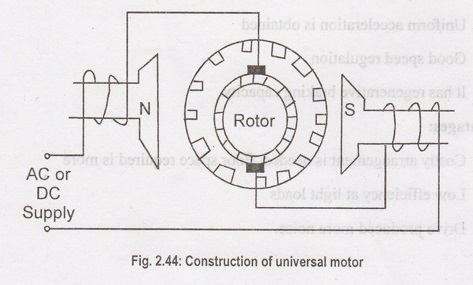
Le rotor et le stator sont laminés pour réduire l’inductance dans le but d’éviter les problèmes causés par les courants de Eddy, lorsqu’ils sont alimentés en courant alternatif.
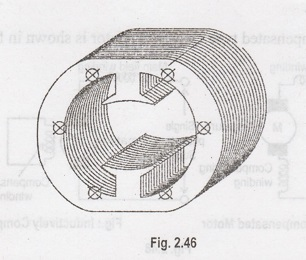
Un exemple de stator laminé :
Tension induit nominale 180V, puissance 400W, Vitesse maxi : 20 000 tr/min
Sur ce type de moteur, sans régulation externe, la vitesse est très élevé à faible charge et diminue avec la charge.
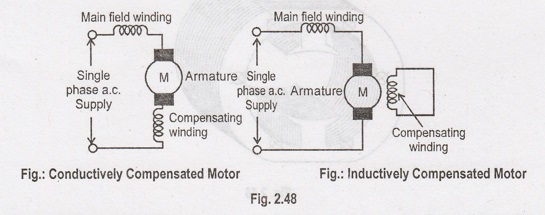
Il existe également des moteurs universels compensés. Ils ont un stator similaire à un moteur à phase auxiliaire, avec un enroulement permettant de compenser l’inductance lorsque le moteur est alimenté en alternatif.
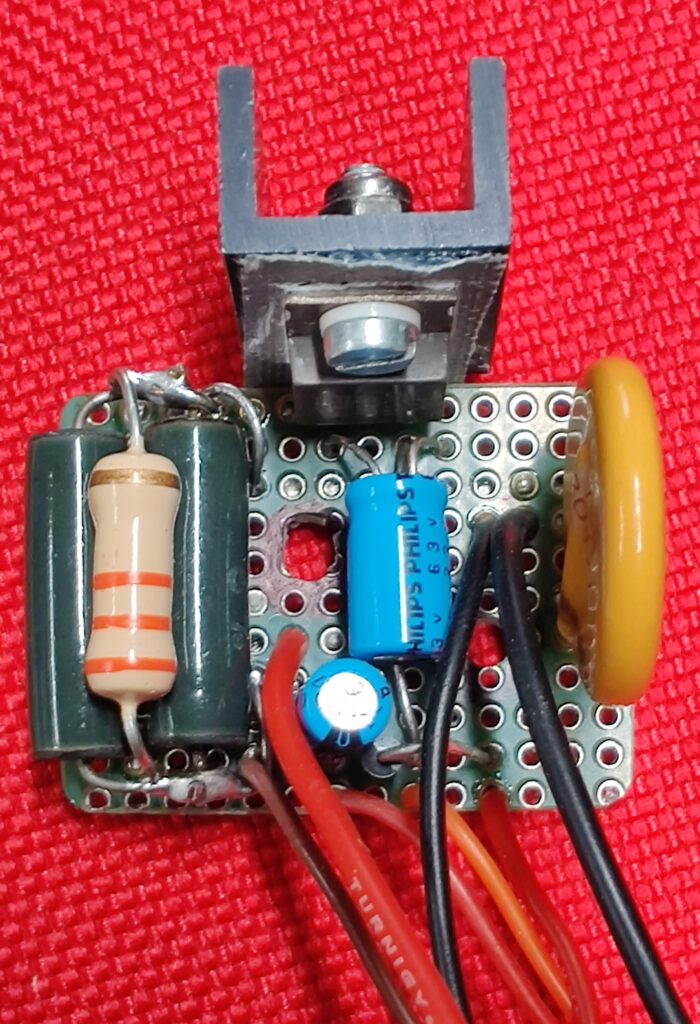
Le variateur très basique de la perceuse, un seul thyristor et 6 composants (deux diodes, deux condensateurs, une résistance, un varistor :
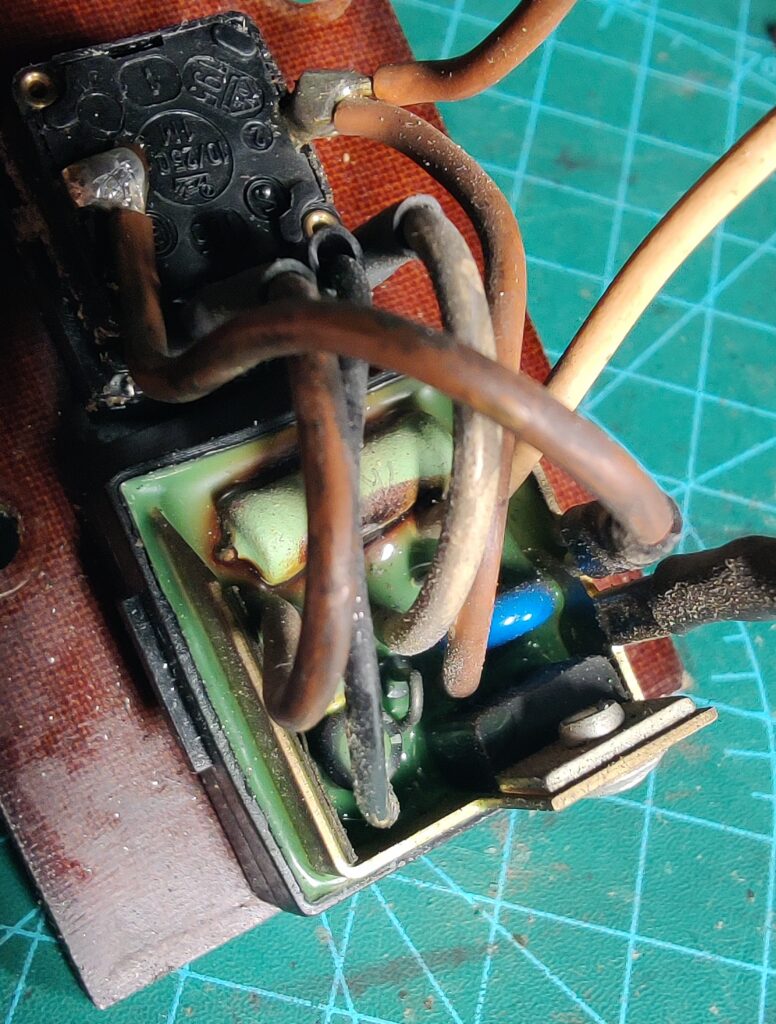

Grattage de la résine pour vérifier le schéma :

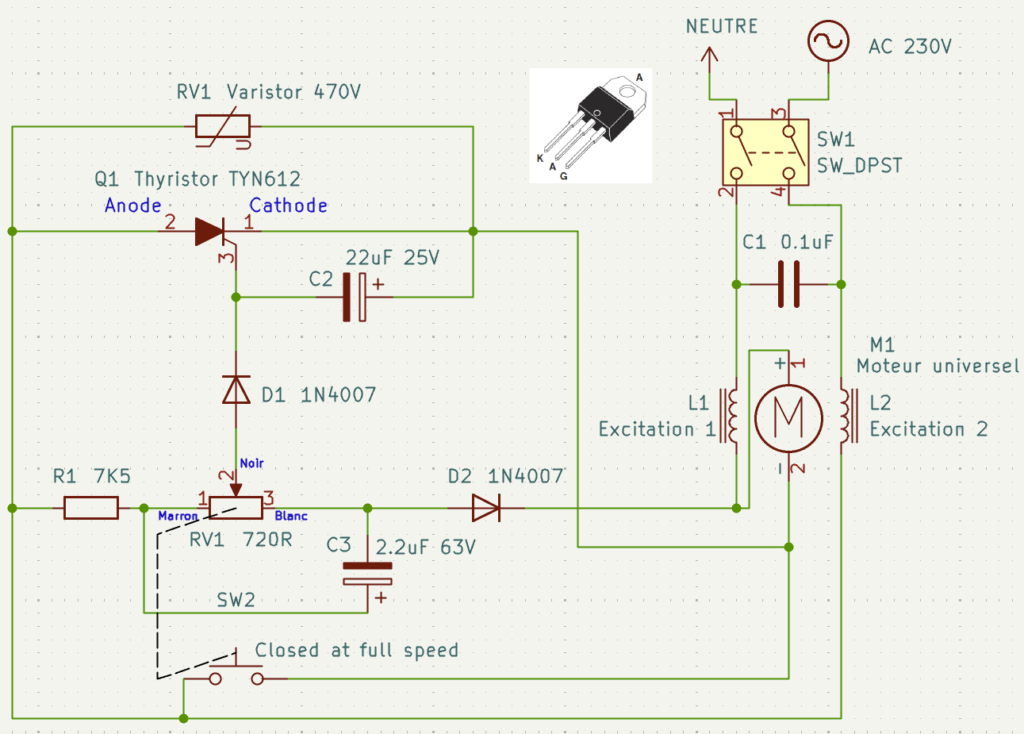
Le schéma du variateur à thyristor, montage série. L’interrupteur poussoir SW2 permet d’obtenir la pleine vitesse en court-circuitant le thyristor. D’origine il se ferme probablement automatiquement lorsqu’on tourne le potentiomètre sur la position 6. Il était fermé en permanence sur ma machine, ce qui a rendu difficile la compréhension du système.
Fabrication d’un nouveau variateur, le thyristor du variateur d’origine étant HS :
Voici le premier test après remise en état du collecteur, resserrage de la cage du stator, et remplacement du variateur DC (un quadrant) d’origine irréparable (coulé dans la résine, et de toutes façons très bas de gamme avec un découpage mono-alternance à un seul thyristor). Les roulements sont usés, à changer.
Le moteur tourne ici provisoirement sur deux alimentations stabilisée, en excitation séparée série régulée à 0.9 ampère.
Ajout d’un connecteur SuperSeal 6 broches pour faciliter la maintenance :
Le bout d’arbre moteur semble étrange, une vis Torx mâle à 4 lobes en hélice ? Non, il s’agit du bout d’arbre moteur, à l’origine un pignon formé sur l’arbre pour une réduction avec un engrenage à denture inclinée. Une douille a été montée serrée sur l’arbre, pour permettre d’y monter une poulie emmanchée avec un léger serrage.
Un moteur avec un pignon similaire directement formé sur l’arbre :

Remplacement des roulements et remise en état du collecteur :


A suivre… prochaine étape, installation probable d’un variateur 4 quadrants, pour permettre l’inversion contrôlée du sens de rotation, sans danger pour le collecteur.
Quelques informations sur les moteurs universels
Les petits moteurs universels utilisés dans les outils portatifs ou dans l’électroménagers sont produits en deux types, selon leur sens de rotation. Celui de la perceuse Genko TB6 est du premier type.
- Moteurs à sens unique
- Moteurs tournant dans le sens horaire.
- Moteurs tournant dans le sens antihoraire.
- Moteurs pouvant tourner dans les deux sens
- Moteurs avec décalage (déplacement) des balais.
- Moteurs fonctionnant sous basse tension.
La différence entre ces moteurs réside dans les enroulements de l’induit (armature) :
- Si les extrémités de chaque bobine connectées au collecteur de l’induit sont mécaniquement alignées avec l’axe de la bobine, le moteur peut tourner dans les deux sens.
- Si elles sont connectés à droite de l’axe de la bobine, le moteur tourne vers la droite.
- Si elles sont connectés à gauche de l’axe de la bobine, le moteur tourne vers la gauche.
Si un moteur universel prévu pour un seul sens de rotation, alimenté en 110 V ou 220 V alternatif, est branché pour tourner dans l’autre sens, il fonctionnera. Cependant, des arcs apparaissent aux balais ce qui peut entraîner sa destruction. Pour faire fonctionner des moteurs universels à sens unique dans les deux sens, on applique la tension nominale dans le sens normal de rotation et une basse tension dans le sens inverse pour éviter l’apparition d’arcs électriques. Cela a pour conséquence de réduire fortement la vitesse, la puissance et le rendement du moteur dans le sens inverse.
Les moteurs universels bobinés pour une rotation dans les deux sens peuvent avoir deux types d’enroulements d’induit :
- Induits bobinés pour la tension nominale
Dans ce type d’induit, les balais doivent être déplacés (décalés) lors du changement de sens de rotation. Les moteurs de haute performance utilisent cette méthode. - Induits bobinés pour une tension supérieure à la tension nominale Ces induits sont bobinés pour une tension et une vitesse supérieures aux valeurs normales, mais ils sont utilisés à la tension nominale. Cela crée l’illusion d’une basse tension appliquée aux enroulements, ce qui empêche l’apparition d’arcs électriques quelque soit le sens de rotation. Le déplacement des balais n’est donc pas nécessaire lors du changement de sens de rotation dans ces moteurs. Ils sont largement répandus parce que nettement moins onéreux à produire.
Si cet article vous a été utile ou agréable, pensez à faire un petit don en retour pour aider au financement de l’hébergement du site.
Le variateur de la Genko TB6
La perceuse Genko TB6 utilise un variateur simple alternance avec rétroaction, permettant de maintenir la vitesse lorsque le couple augmente. Ce circuit de commande permet d’obtenir une commande de vitesse variable en continu avec une performance de régulation correcte au regard du nombre de composants et du cout très faible.
Voici une analyse du fonctionnement de ce variateur, en provenance de la bible sur les thyristors écrite par son inventeur, General Electric : SCR manual, 4th Edition. Ce circuit est pratiquement identique au variateur installé par Genko. Une petite différence, le variateur Genko est branché entre les enroulements d’excitation, il ne voit donc pas directement la totalité de la tension secteur.
Analyse du fonctionnement
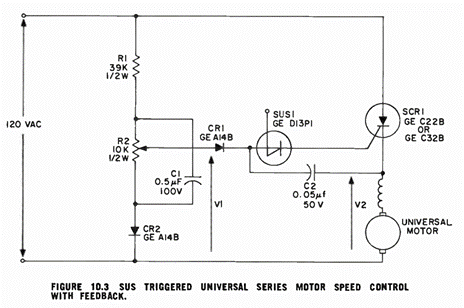
Les circuits des Figures 10.1 et 10.3 fournissent un courant continu redressé en simple alternance au moteur. Pour obtenir une vitesse maximale avec ces circuits, le moteur doit être conçu pour une tension nominale d’environ 180 volts lorsqu’il fonctionne sur le secteur 240 volts.
NB : la durée de vie des balais d’un moteur alimenté par un circuit simple alternance peut être légèrement inférieure à celle d’un moteur équivalent alimenté en courant alternatif pleine onde.
Le circuit illustré utilise le retour de force électromotrice résiduelle (back EMF) pour fournir plus de puissance au moteur lorsque la vitesse diminue sous charge mécanique. Cette tension de back EMF dépend du magnétisme résiduel du moteur, qui est déterminé par sa structure magnétique. Le moteur utilisé doit avoir suffisamment de magnétisme résiduel.
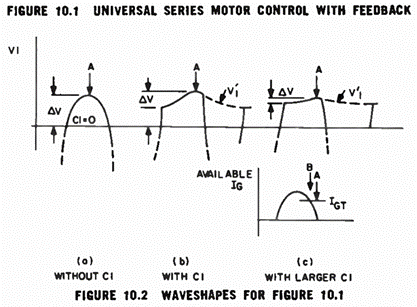
Le circuit de la Figure 10.1 fonctionne en comparant la back EMF résiduelle V2 du moteur avec une référence de tension V1 générée par un circuit diviseur de tension. Si le condensateur C1 n’est pas présent, la tension V1 résulte uniquement du pont diviseur composé de R1 et du potentiomètre R2.
Le courant circule dans cette branche uniquement pendant la demi-alternance positive à cause de la diode CR2. La tension en V1 est alors une demi-sinusoïde avec une valeur maximale au moment “A” (Figure 10.2a).
Si la back EMF résiduelle est supérieure à ce maximum (le moteur tourne plus vite que la vitesse sélectionnée), CR1 sera polarisée en inverse et le thyristor ne sera pas déclenché, ne fournissant pas de puissance au moteur pendant cette demi-alternance. Lorsque le moteur ralentit et que sa back EMF diminue, V2 devient légèrement inférieure à V1 au moment “A”, provoquant le passage du courant dans CR1 et vers la gâchette du thyristor, ce qui le déclenche.
La vitesse à laquelle cela se produit peut-être modifiée en ajustant la tension V1 via le potentiomètre R2.
Remarque : l’impulsion minimale de puissance pouvant être appliquée au moteur correspond à un quart de cycle, car le dernier moment possible pour déclencher le thyristor est le pic de la tension secteur.
Si le moteur est fortement chargé et que sa vitesse et sa back EMF continuent de diminuer, le moment où V1 devient supérieur à V2 arrive plus tôt dans le cycle, ce qui déclenche le thyristor plus tôt et fournit plus de puissance au moteur.
Si, en revanche, le moteur est faiblement chargé et tourne à basse vitesse, une puissance d’un quart de cycle peut suffire pour modifier significativement la vitesse. Cela peut nécessiter de nombreux cycles pour revenir à la vitesse où le thyristor se déclenchera de nouveau, provoquant un phénomène de “hunting” ou de cogging, souvent accompagné de bruits mécaniques désagréables.
Pour atténuer ce problème, l’incrément de puissance minimal doit être réduit d’un quart de cycle à la quantité nécessaire pour juste compenser l’énergie perdue par cycle. Pour ce faire, le condensateur C1 est ajouté au circuit.
La tension du condensateur devient alors une sinusoïde pendant la demi-alternance positive. Cette tension est décalée en phase selon la constante de temps du circuit et subit une décroissance exponentielle pendant la demi-alternance négative.
La Figure 10.2(b) montre les résultats sur V1. Deux effets principaux peuvent être observés :
- Le dernier point de déclenchement possible “A” est retardé, réduisant considérablement l’incrément minimal de puissance.
- La variation de V2 nécessaire pour passer de la puissance minimale à la puissance maximale (ΔV) est réduite, offrant un contrôle plus efficace.
En augmentant encore C1, on obtient les résultats de la Figure 10.2(c). Le point de déclenchement “A” arrive encore plus tard, et ΔV devient encore plus petit.
⚠️ Attention : augmenter C1 diminue ΔV et augmente le gain de boucle du système, ce qui peut aussi provoquer une instabilité et du hunting.
Il est important que l’impédance du réseau formé par R1, R2, et C1 soit suffisamment faible pour fournir le courant nécessaire au déclenchement du thyristor sans surcharge excessive.
On peut voir dans la Figure 10.2(c) que ce courant de déclenchement disponible approche une forme sinusoïdale, avec un pic à 90°. Si le courant nécessaire pour déclencher le thyristor est IGT, le dernier point possible de déclenchement serait alors “B”, et non “A”, comme on pourrait le croire d’après la forme de la tension.
Dans la plupart des cas, pour un bon fonctionnement à basse vitesse sans restriction sur le courant de gâchette, il faut un réseau résistif à très faible impédance, ce qui rendrait les résistances et le condensateur trop gros et coûteux.
Dans ces situations, un dispositif de déclenchement basse tension comme un SUS (Silicon unilateral switch, un genre de diac unilatéral à tension de déclenchement ajustable) peut agir comme amplificateur de gâchette, comme dans la Figure 10.3.
- L’utilisation du SUS permet d’utiliser un réseau à impédance beaucoup plus élevée pour R1, R2, et C1, permettant d’utiliser des composants plus petits et moins coûteux.
- Dans ce circuit, la tension de référence V1 doit dépasser la back EMF V2 de la tension de breakover du SUS (environ 8 à 10 volts).
- Lorsque le SUS se déclenche, il décharge C2 dans la gâchette, fournissant une impulsion de courant suffisamment forte pour déclencher le thyristor.
Cela élimine toute dépendance du circuit au courant de déclenchement du thyristor utilisé et donc supprime le besoin de sélectionner les thyristors selon leur courant de gâchette.
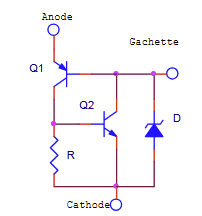
Quelques précisions sur les SUS
Le commutateur unilatéral SUS est un dispositif constitué par un thyristor miniature, auquel est associée une diode à avalanche à basse tension. Il comporte trois électrodes : anode, la cathode et gâchette.
Le fonctionnement d’un SUS s’explique facilement à l’aide de son circuit équivalent ci-dessous. Il se déclenche lorsqu’une tension fixe, déterminée par sa diode à avalanche, est appliquée entre l’anode et la cathode. La gâchette du SUS n’est utilisée que si l’on désire une synchronisation ou une commutation forcée. Elle permet par exemple un contrôle fin la tension de déclenchement.
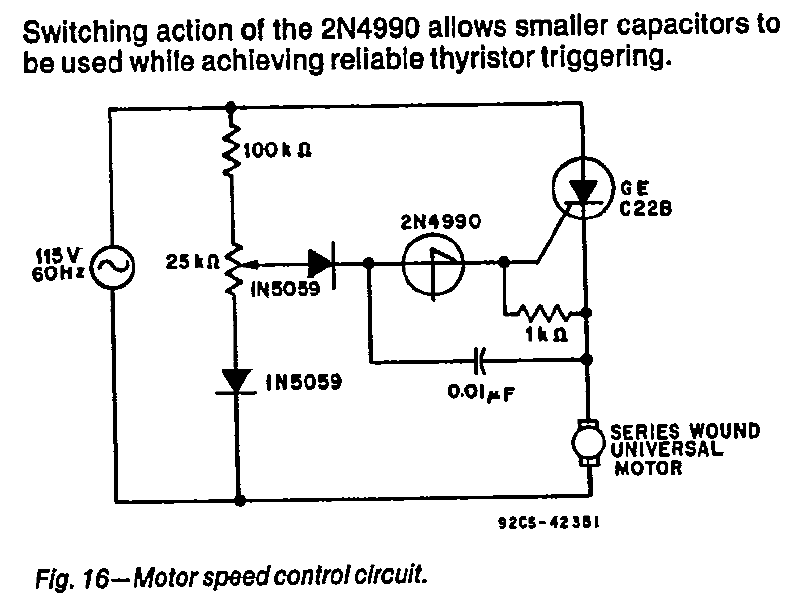
Un autre exemple d’utilisation d’un SUS, en provenance du datasheet du SUS 2N4990.
Laisser un commentaire